Разработаны миниатюрные подводные роботы для проверки состояния трубопроводов ядерных станций
Исследования, проведенные недавно специалистами в области ядерной энергетики, показали, что три четверти энергетических ядерных реакторов во всем мире имеют утечки в первом, "грязном", контуре охлаждения реакторов. Трубы, по которым подается вода для охлаждения реакторов, большинство из которых находится в эксплуатации более 30 лет, под воздействием коррозии теряют герметичность. Это чревато том, что они пропускают наружу воду, в которой содержится радиоактивный тритий, который затем попадает в грунтовые воды.
Обнаружение утечек, особенно в трубопроводах первого контура, сопряжено с многими трудностями. Большинство труб прокладывается под землей, радиационный фон в этих местах повышен, что затрудняет выполнение диагностики и ремонтных мероприятий, поэтому в настоящее время используются косвенные диагностические методы, основанные на измерении электропроводности между землей и трубопроводом, на ультразвуковых диагностических технологиях, которые, как известно не дают однозначного результата, оставляя шанс пропустить место утечки. Единственным надежным методом диагностики, дающим стопроцентный результат, является извлечение трубопроводов и проведение их внешнего осмотра. Не стоит и упоминать, с какими трудностями и проблемами связаны проведение такой диагностики и ремонта.
Для решения проблемы диагностики состояния трубопроводов ядерных электростанций, исследователи из Массачусетского технологического института разработали малогабаритных сферических плавающих роботов, которые могут осмотреть трубопроводы изнутри, передавая данные в режиме реального времени.
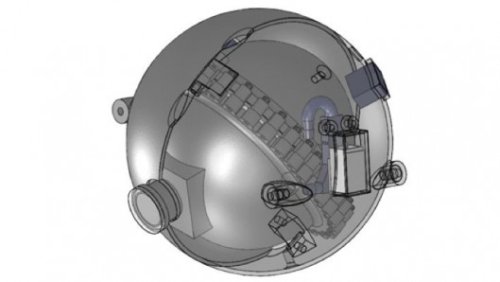
Эти роботы имеют размер, сопоставимый с размерами обычного куриного яйца. Благодаря малым габаритам, их можно поместить внутрь большинства магистралей трубопроводов. Двигаясь по трубопроводам, эти роботы производят съемку внутренней поверхности труб с помощью встроенной камеры и передают назад данные, используя лазерную оптическую систему, дальности действия которой хватает на 100 метров удаления.
Поскольку наличие вращающихся гребных винтов и плоскостей, регулирующих направление движения, может стать причиной застревания робота в трубопроводе, эти роботы двигаются, используя течение потока воды в трубопроводе. Для управления направлением движения и положением робота в пространстве используются клапаны специальной формы, соединяющие сеть крошечных внутренних трубопроводов. Выборочное открытие или закрытие клапанов определяет, по каким трубопроводам вода подается к миниатюрному водометному двигателю, используя явление, известное как эффект Коанда, для управления направлением реактивного потока. Внутренняя часть корпуса робота, в которую встроена сложная система трубопроводов, была изготовлена из специального материала методом 3D-печати слой за слоем. Только используя трехмерную печать можно достаточно дешево изготовить эту миниатюрную конструкцию.
Для этого робота другая группа исследователей разрабатывает систему, которая позволит управлять зумом и направлением, куда смотрит камера. Это будет достигнуто благодаря использованию шарнирной подвески с двумя степенями свободы, которая позволит сдвигать центр тяжести робота в произвольную точку, что, в свою очередь, позволит управлять положением робота и камеры с помощью команд.
Трубопроводы, заполненные радиоактивной жидкостью, являются, мягко говоря, не очень дружественной средой для функционирования таких высокотехнологичных устройств, как этот робот. Поэтому срок службы такого робота составляет всего несколько "погружений", после чего его необходимо просто выбросить, применяя специальные меры осторожности и утилизации. Но это все равно является более дешевым и быстрым методом, с помощью которого можно проводить диагностику состояния трубопроводов ядерных станций.
 Исследования, проведенные недавно специалистами в области ядерной энергетики, показали, что три четверти энергетических ядерных реакторов во всем мире имеют утечки в первом, "грязном", контуре охлаждения реакторов. Трубы, по которым подается вода для охлаждения реакторов, большинство из которых находится в эксплуатации более 30 лет, под воздействием коррозии теряют герметичность. Это чревато том, что они пропускают наружу воду, в которой содержится радиоактивный тритий, который затем попадает в грунтовые воды.
Исследования, проведенные недавно специалистами в области ядерной энергетики, показали, что три четверти энергетических ядерных реакторов во всем мире имеют утечки в первом, "грязном", контуре охлаждения реакторов. Трубы, по которым подается вода для охлаждения реакторов, большинство из которых находится в эксплуатации более 30 лет, под воздействием коррозии теряют герметичность. Это чревато том, что они пропускают наружу воду, в которой содержится радиоактивный тритий, который затем попадает в грунтовые воды.